
王者這游戲術語真不少,玩久了才發現好多詞都得懂點。簡單說幾個常見的:英雄就是你操作的那個角色,每個都有不一樣技能和玩法;對戰就是pvp,1v1、3v3、5v5都有;隊伍就是開黑的兄弟團,組隊一起剛;裝備得買,越貴越猛,屬性直接拉滿;技能是英雄的看家本事,有傷害有輔助,但放完要等冷卻,別亂按;血條就是生命值,掉光就gg;藍條是法力值,放大招耗藍,沒藍等于廢;打怪或兵就能拿經驗,升級變強;補刀是最后一擊小兵或野怪,錢和經驗全歸你;金幣是游戲里通用貨幣,出裝全靠它;塔是地圖上的防御塔,保護基地用的,拆塔也很關鍵;buff是野怪給的增益效果,比如紅藍buff,打了有加成;皮膚純屬換皮,好看不加屬性;天賦是被動技能,升級能選,影響英雄成長;rmb玩家就是氪金大佬,花錢如流水;pk就是單挑或小規模干架;打機就是開玩,打一局的意思。這些詞基本天天見,搞明白舒服多了。
-
-
由公眾持有的政府的凈貨幣性負債。在美國,貨幣基礎等于通貨加上銀行準備金。有時稱高能貨幣(hghpowered money)。
-
1.名詞解釋
⑴ 多媒體技術
多媒體技術就是把聲、圖、文、視頻等媒體通過計算機集成在一起的技術。即通過計算機把文本、圖形、圖像、聲音、動畫和視頻等多種媒體綜合起來,使之建立起邏輯連接,并對它們進行采樣量化、編碼壓縮、編輯修改、存儲傳輸和重建顯示等處理。
⑵ 多媒體平臺軟件
一個理想的多媒體平臺軟件,要求具有以下各種功能。
(1)提供良好的、面向對象的編程環境
(2)媒體導入和輸出功能
(3)正確處理相關媒體(例如動畫文件及其配音文件)之間的同步關系,
(4)超文本、超媒體和多媒體數據管理功能
(5)支持應用程序的動態鏈接
(6)交互、導航功能
常見平臺軟件有:
(1)PowerPoint
(2)Authorware
(3)ToolBook
(4)Director
(5)Visual Basic
⑶ 視頻捕捉卡
視屏撲捉卡需要占用電腦的一個擴充槽,視頻信號通過它由放像設備被捕捉入電腦。一般來說,視屏捕捉卡都附帶一個擴展塢,上面供用以連接放像設備的各種插口。
⑷ 有損壓縮編碼
所謂有損壓縮是利用了人類對圖像或聲波中的某些頻率充分不敏感的特性,允許壓縮過程中損失一定的信息;雖然不能完全恢復原始數據,但是所損失的部分對理解原始圖像的影響縮小,卻換來了大得多的壓縮比。有損壓縮廣泛應用于語音,圖像和視屏數據的壓縮。
⑸ 圖像銳化處理
圖像銳化處理就是補償圖像的輪廓,增強圖像的邊緣及灰度跳變的部分,使圖像變得清晰。 -
GPS定位衛星,在全球范圍內實時進行來自定位、導航的系統,稱為全球衛星定位系統,簡稱GPS。GPS是由美國國防部研制建立的一種具有全方位、全天候、全時段、高精度的衛星導航系統,能為全球用戶提供低成本、高精度的三維位置、速度和精確定時等導航信息,是衛星通信技術在導航領域的應用典范,它極大地提高了地球社會的信息化水平,有力地推動了數字經濟的發展。
簡介
GPS可以提供車輛定位、防盜、反劫、行駛路線監控及呼叫指揮等功能。要實現以上所有功能必須具備GPS終端、傳輸網絡和監控平臺三個要素。
發展
GPS的前身是美國軍方研制的一種子午儀衛星定位系統(Transit),1958年研制,1964年正式投入使用。該系統用5到6顆衛星組成的星網工作,每天最多繞過地球13次,并且無法給出高度信息,在定位精度方面也不盡如人意。然而,子午儀系統使得研發部門對衛星定位取得了初步的經驗,并驗證了由衛星系統進行定位的可行性,為GPS的研制埋下了鋪墊。由于衛星定位顯示出360問答在導航方面的巨大優越性及子午儀系統存在對潛艇和艦船導航方面的巨大缺陷。美國海陸空三軍及民用部門都感到迫切需要一種新的衛星導航系統。
為此,美國海軍研究實驗室(NRL)提出了名為Tinmation的用12到18顆衛星組成10000km高度的全球定位網計劃,并于1967年、1969年和1974年各發射了一顆試驗衛星,在這些衛星上初步試驗了原子鐘計時系統,這是GPS精確定位的基礎。而美國空軍則提出了621-B的以每星群4到5顆衛星組成3至4個星群的計劃,這些衛星中除1顆采用同步軌道外其余的都使用周期為24h的傾斜軌道,該計劃以偽隨機碼(PRN)為基礎傳播衛星測距信號,其強大的功能,當信號密度低于環境噪矛應似聲的1%時也能將其檢測出來。偽隨機碼的成功運用是GPS得以取得成功的一個重要基礎。海軍的計劃主要用于為艦船提供低動態的2維定位,空軍的計劃能供提供高動態服務,然而系統過于復雜。由于同時研制兩個系統會造成巨大的費用而且這里兩個計劃都粒呼歡是為了提供全球定位而設計的,所以1973年美國國防部將2者合二為一,并由國防部牽頭的衛星導航定位聯合計劃局(JPO)領導,還將辦事機構設立在洛杉磯的空軍航天處。該機構成員眾多,包括美國陸軍、海軍、海軍陸戰隊、交通部、國防制圖局、北約和澳大利亞的代表。 [1]
最初的GPS計劃在美國聯合計劃局的領導下誕生了,該方案將24顆衛星放置在互成120度的三個北哪軌道上。每個軌道上有8顆衛星,地球上任何一點均能觀測到6至9顆衛星。這樣,粗碼精度可達100m,精碼精度為10m。由于預算壓縮,GPS計劃不得不減少衛星發射數量,改為將18顆衛星分布在互成60度的6個軌道上,然而這一方案使得衛星可靠性得不到保障。1988年又進行了最后一次修改:21顆工作星和3顆備用星工作在互漸友時并成60度的6條軌道上。這也是GPS衛星所使用的工作方式。
GPS導航系統是以全球24顆定位人造衛星為基礎,向全球各地全天候地提供三維位置希約面衛、三維速度等信息的一種無線電導航定位系統。它由三部分構成,一是地面控制部分,由主控站、地面天線、監測站及通訊輔助系統組成。二是空間部分,由24顆衛星組成,分布在6個軌道平面。三是用戶裝置部分,由GPS接收機和衛星天線組成。民用的定位精度可達10米內。
工作原理
定位原理
GPS導航系統的基本原理是測量出已知位置的衛星到用戶接收機之間的距離,然后綜合多顆衛星的數據就可知道接收機的具體位置。要達到這一目的,衛星的位置可以根據星載時鐘所記錄的時間在衛星星歷中查出。而用戶到衛星的距離則通過記錄衛星信號傳播到用戶所經歷的時間,再將其乘以光速得到(由于大氣層電離層的干擾,這一距離并不是用戶與衛星之間的真實距離,而是偽距(PR,):當GPS衛星正常工作時,會不斷地用1和0二進制碼元組成的偽隨機碼(簡稱偽碼)發射導航電文。GPS系統使用的偽碼一共有兩種,分別是民用的C/A碼和軍用的P(Y)碼。C/A碼頻率1.023MHz,重復周期一毫秒,碼間距1微秒,相當于300m;P碼頻率10.23MHz,重復周期266.4天,碼間距0.1微秒,相當于30m。而Y碼是在P碼的基礎上形成的,保密性能更佳。導航電文包括衛星星歷、工作狀況、時鐘改正、電離層時延修正、大氣折射修正等信息。它是從衛星信號中解調制出來,以50b/s調制在載頻上發射的。導航電文每個主幀中包含5個子幀每幀長6s。前三幀各10個字碼;每三十秒重復一次,每小時更新一次。后兩幀共15000b。導航電文中的內容主要有遙測碼、轉換碼、第1、2、3數據塊,其中最重要的則為星歷數據。當用戶接受到導航電文時,提取出衛星時間并將其與自己的時鐘做對比便可得知衛星與用戶的距離,再利用導航電文中的衛星星歷數據推算出衛星發射電文時所處位置,用戶在WGS-84大地坐標系中的位置速度等信息便可得知。 GPS
GPS
可見GPS導航系統衛星部分的作用就是不斷地發射導航電文。然而,由于用戶接受機使用的時鐘與衛星星載時鐘不可能總是同步,所以除了用戶的三維坐標x、y、z外,還要引進一個Δt即衛星與接收機之間的時間差作為未知數,然后用4個方程將這4個未知數解出來。所以如果想知道接收機所處的位置,至少要能接收到4個衛星的信號。
GPS接收機可接收到可用于授時的準確至納秒級的時間信息;用于預報未來幾個月內衛星所處概略位置的預報星歷;用于計算定位時所需衛星坐標的廣播星歷,精度為幾米至幾十米(各個衛星不同,隨時變化);以及GPS系統信息,如衛星狀況等。
GPS接收機對碼的量測就可得到衛星到接收機的距離,由于含有接收機衛星鐘的誤差及大氣傳播誤差,故稱為偽距。對 CA碼測得的偽距稱為CA碼偽距,精度約為20米左右,對P碼測得的偽距稱為P碼偽距,精度約為2米左右。
GPS接收機對收到的衛星信號,進行解碼或采用其它技術,將調制在載波上的信息去掉后,就可以恢復載波。嚴格而言,載波相位應被稱為載波拍頻相位,它是收到的受多普勒頻 移影響的衛星信號載波相位與接收機本機振蕩產生信號相位之差。一般在接收機鐘確定的歷元時刻量測,保持對衛星信號的跟蹤,就可記錄下相位的變化值,但開始觀測時的接收機和衛星振蕩器的相位初值是不知道的,起始歷元的相位整數也是不知道的,即整周模糊度,只能在數據處理中作為參數解算。相位觀測值的精度高至毫米,但前提是解出整周模糊度,因此只有在相對定位、并有一段連續觀測值時才能使用相位觀測值,而要達到優于米級的定位 精度也只能采用相位觀測值。
按定位方式,GPS定位分為單點定位和相對定位(差分定位)。單點定位就是根據一臺接收機的觀測數據來確定接收機位置的方式,它只能采用偽距觀測量,可用于車船等的概略導航定位。相對定位(差分定位)是根據兩臺以上接收機的觀測數據來確定觀測點之間的相對位置的方法,它既可采用偽距觀測量也可采用相位觀測量,大地測量或工程測量均應采用相位觀測值進行相對定位。
在GPS觀測量中包含了衛星和接收機的鐘差、大氣傳播延遲、多路徑效應等誤差,在定位計算時還要受到衛星廣播星歷誤差的影響,在進行相對定位時大部分公共誤差被抵消或削弱,因此定位精度將大大提高,雙頻接收機可以根據兩個頻率的觀測量抵消大氣中電離層誤差的主要部分,在精度要求高,接收機間距離較遠時(大氣有明顯差別),應選用雙頻接收機。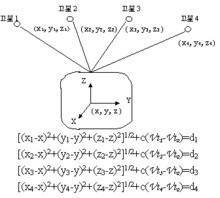 GPS定位原理
GPS定位原理
GPS定位的基本原理是根據高速運動的衛星瞬間位置作為已知的起算數據,采用空間距離后方交會的方法,確定待測點的位置。如圖所示,假設t時刻在地面待測點上安置GPS接收機,可以測定GPS信號到達接收機的時間△t,再加上接收機所接收到的衛星星歷等其它數據可以確定以下四個方程式。
定位精度